Research Summary
My research interests lie at the broad interface of dynamical systems, control, optimization and formal methods with applications in system identification and validation, autonomy and vision. I am particularly interested in developing novel algorithms to extract information from dynamic data streams (e.g., for learning dynamics or specifications, or for detecting fault and anomalies), and designing robust cyber-physical systems that can autonomously react to uncovered environmental uncertainty and stimuli, and perform complex tasks in dynamic environments. This page aims to summarize some research highlights (not updated frequently though).
Recent Talks:
Some fundamental limitations of learning for dynamics and control, Autonomy Talks, February 2024 (video).
Formal methods for cyber-physical systems, NSF CPS PI Meeting Keynote, November 2022 (video).
Learning models and constraints with limited data, Caltech Control Meets Learning Virtual Seminar, April 2021 (video).
Safety for autonomous systems with information abundance and scarcity, KAUST Research Conference on Robotics and Autonomy, April 2021 (video).
Coordination of for Large Collections of Dynamical Systems with Constraint Satisfaction Guarantees, Simons Institute Workshop on Synthesis of Models and Systems, April 2021 (video).
On-going Projects:
(CLEVR-AI) Control and Learning Enabled Verifiable Robust AI (Sponsor: ONR MURI, Role: Michigan PI, joint with Northeastern, Johns Hopkins, and Berkeley)
An Open-Source Ecosystem for Scenic (Sponsor: NSF, Role: Michigan PI, joint with Berkeley, UC Santa Cruz, and UNC)
Lifted Hybridization: A New Representation for Efficient Control and Verification of Cyber-Physical Systems (Sponsor: NSF, Role: PI)
Synthesis of Complex/Distributed Sense and Control Systems via Formal Methods
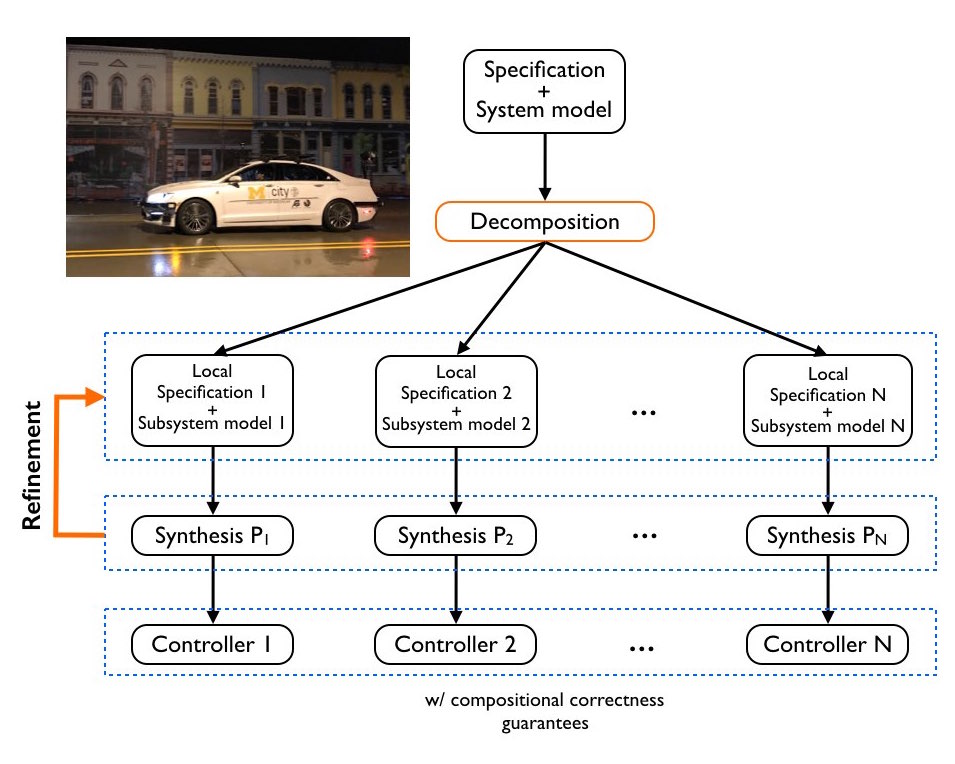
We study correct-by-construction control synthesis for safety-critical cyber-physical systems. By combining ideas from automata theory, formal logics, hybrid systems and control, we develop theory and tools for design and analysis of large-scale, complex, distributed sensing, actuation and control systems. In particular, we develop scalable algorithms that can design (synthesize) controllers with formal correctness guarantees by identifying and exploiting structural properties of systems. Recent focus is on handling imperfect information while providing safety guarantees.
 |
|
P. Nuzzo, H. Xu, N. Ozay, J. B. Finn, A. L. Sangiovanni-Vincentelli, R. M. Murray, A. Donze, and S. A. Seshia, “A Contract-Based Methodology for Aircraft Electric Power System Design”, IEEE Access, 2:1-25, 2014.
J. Liu, N. Ozay, U. Topcu, and R. M. Murray, “Synthesis of Switching Protocols from Temporal Logic Specifications”, IEEE Transactions on Automatic Control, 2013. (project page)
T. Wongpiromsarn, U. Topcu, N. Ozay, H. Xu, and R. M. Murray, “TuLiP: a software toolbox for receding horizon temporal logic planning”, 14th International Conference on Hybrid Systems: Computation and Control (HSCC), Chicago, IL, April 2011.
Information Extraction and Learning Dynamics from Data
We live in a data-rich world. With the increasing acquisition and storage capacity, we have the ability to collect and store excessive amounts of high dimensional data. I am broadly interested in making sense of data coming from dynamical systems with particular emphasis on computational efficiency and sample efficiency. I have extensively worked on identification of hybrid systems. Our current focus in this direction is understanding complex dynamic networks, online (closed-loop) identification algorithms, identifiability and identification questions in (inverse) reinforcement learning, and non-asymptotic analysis of learning algorithms for dynamical systems. I am also interested in learning specifications and preferences from humans to be used for correct-by-construction synthesis and personalization.
R. Karagulle, N. Arechiga, A. Best, J. DeCastro, and N. Ozay, “A Safe Preference Learning Approach for Personalization with Applications to Autonomous Vehicles”, IEEE Robotics and Automation Letters, 2024.
X. Zeng, Z. Liu, Z. Du, N. Ozay, and M. Sznaier, “On the Hardness of Learning to Stabilize Linear Systems”, Proc. 62nd IEEE Conference on Decision and Control (CDC), Singapore, December 2023.
S. Oymak and N. Ozay, “Revisiting Ho-Kalman based system identification: robustness and finite-sample analysis”, IEEE Transactions on Automatic Control, 2021.
G. Chou, N. Ozay, and D. Berenson, “Learning Constraints from Locally-Optimal Demonstrations under Cost Function Uncertainty”, IEEE Robotics and Automation Letters, 5(2): 3682 - 3690, April 2020.
N. Ozay, “An exact and efficient algorithm for segmentation of ARX models”, Proc. American Control Conference (ACC), Boston, MA, July 2016.
N. Ozay, C. M. Lagoa, and M. Sznaier, “Set Membership Identification of Switched Linear Systems with Known Number of Subsystems”, Automatica, Vol. 51: 180-191, January 2015.
N. Ozay, M. Sznaier, C. M. Lagoa, and O. Camps, “A Sparsification Approach to Set Membership Identification of Switched Affine Systems”, IEEE Transactions on Automatic Control, 57(3):634-648, March 2012. (link)
N. Ozay, “Convex Relaxations for Robust Identification of Hybrid Models”, Ph.D. Dissertation, Northeastern University, (defended May 2010). (link)
N. Ozay, M. Sznaier, C. M. Lagoa, and O. Camps, “Generalized PCA with Denoising: A Moments-Based Convex Approach”, Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, June 2010. (project page)
N. Ozay, M. Sznaier, C. M. Lagoa, and O. Camps “A Sparsification Approach to Set Membership Identification of a Class of Affine Hybrid Systems”, Proc. 47th IEEE Conference on Decision and Control (CDC), Cancun, Mexico, December 2008. (link) -Best Student Paper Award
N. Ozay, M. Sznaier, and O. Camps, “Sequential Sparsification for Change Detection”, Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Anchorage, Alaska, June 2008. (link)
Anomaly Detection via Robust Model Conformance for Cyber-Physical Systems
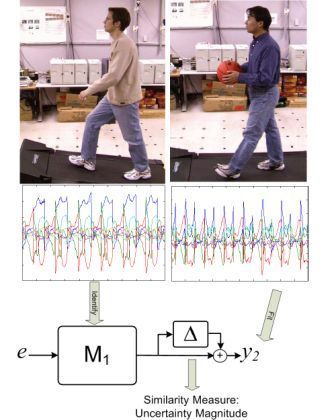
We are working on data-driven and model-based analysis of cyber-physical systems by combining ideas from model invalidation/conformance for networked hybrid dynamical systems and run-time verification. Model invalidation is a decision problem where given a (possibly uncertain) dynamical system model and a collection of noisy input/output experimental data, the goal is to decide whether the model can represent (could have generated) the data or not. In addition, it can be used to obtain bounds on the size of the structured dynamical uncertainty entering a model or to detect at run-time deviations from a model. In this line of work, we are trying to understand (i) the computational aspects of this decision problem and corresponding optimization problems, (ii) the effects of network structure on the problem complexity, (iii) fundamental trade-offs between noise and the amount of data (in time and space) required for the invalidation/anomaly detection tasks, (iv) interplay between dynamical and behavioral models when monitoring a system for anomalies. Applications include fault and attack detection in cyber-physical systems, intention estimation in multi-agent systems, and self-aware autonomous robots and vehicles.
 |
|
Older Work:
Control of LPV Systems
My earlier research was on receding horizon control of linear parameter varying systems. We have shown that a separation principle, decoupling the controller and observer design problems, holds for LPV systems. This reformulation allows to reduce the output feedback optimal control problem in to a semidefinite program (SDP). However, the number of LMIs involved in the SDP increases exponentially with horizon length. In order to circumvent this difficulty, we have combined Receding Horizon and risk-adjusted techniques. The resulting controllers are guaranteed to stabilize the plant with probability one and have computational complexity that increases polynomially with the prediction horizon.
M. Sznaier, C. M. Lagoa, and N. Ozay, “Risk-adjusted output feedback receding horizon control of constrained linear parameter varying systems”, International Journal of Robust and Nonlinear Control (Special issue on Nonlinear MPC), 17(17):1614-1633, 2007. (link)
M. Sznaier, C. M. Lagoa, and N. Ozay, “Risk-adjusted output feedback receding horizon control of constrained linear parameter varying systems”, Proc. European Control Conference (ECC), Kos, Greece, July 2007. (link)
N. Ozay, “Receding Horizon Control of Linear Parameter Varying Systems”, Master's Paper, The Pennsylvania State University, May 2006. (abstract)
Biometric Quality
As a research intern at GE Global Research Visualization and Computer Vision Laboratory, I worked on biometric quality assessment of face images. We developed facial image quality metrics that are predictive of the performance of existing biometric matching algorithms. Integration of the quality scores obtained by our method in face recognition decision process improves recognition performance significantly.
N. Ozay, Y. Tong, F. W. Wheeler, and X. Liu “Improving Face Recognition with a Quality-based Probabilistic Framework”, Proc. IEEE Computer Society Workshop on Biometrics (in conjunction with CVPR 2009), Miami, FL, June 2009. (link) -Best Paper Honorable Mention Award
Completed Projects:
Correct-by-Design Control Software Synthesis for Highly Dynamic Systems (Sponsor: NSF, Role: Collaborator)
Fault tolerant controls for thermal management (Sponsor: Ford Motor Co., Role: PI)
Dynamics-based information extraction: a hybrid systems approach (Sponsor: DARPA, Role: PI)
Development of Novel Architectures for Control and Diagnosis of Safety-Critical Complex Cyber-Physical Systems (Sponsor: NSF, Role: co-PI, with Stephane Lafortune as PI)
Run-time anomaly detection and mitigation in information-rich cyber-physical systems (Sponsor: NASA, Role: PI)
Control and Estimation for Provably Safe Interactive Driver Assistance (Sponsor: TRI, Role: PI, joint with Dimitra Panagou and ASU)
Parameter Synthesis and Requirement Analysis for Cyber-Physical Control System Design (Sponsor: ARC, Role: PI)
Formal verification for autonomous aerospace systems (Sponsor: UTC Aerospace Systems, Role: PI, joint with Jean-Baptiste Jeannin)
A Compositional Approach to Modular Cyber-Physical Control System Design (Sponsor: NSF, Role: PI)
Correct-by-construction Control with Non-asymptotic Learning, Estimation and Detection in-the-Loop (Sponsor: ONR, Role: PI)
Logic constrained generative models for prediction and anomaly detection in human motion (Sponsor: Collins Aerospace, Role: PI, joint with Ella Atkins)
Predictive online safety analysis from multi-hop state estimates for high-autonomy on highways (Sponsor: NSF, Role: Michigan PI, joint with Illinois)
Obfuscating dynamic information (Sponsor: Cisco, Role: co-PI, with Stephane Lafortune as PI)
Scalable and safe control synthesis for systems with symmetries (Sponsor: NSF, Role: PI, joint with Johanna Mathieu)
Data-driven modeling and preview-based control for cyber-physical system safety (Sponsor: NSF, Role: PI, joint with Dimitra Panagou, ASU, and Riverside)
Intelligent Testing with Interpretable and High-Capacity Agents by Embedding Logical Structure in Neural Architectures (Sponsor: TRI, Role: Michigan PI, joint with Stanford and Berkeley)
Funding
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()