
Jason J. Corso
| Snippets by Topic | |
| * | Active Clustering |
| * | Activity Recognition |
| * | Medical Imaging |
| * | Metric Learning |
| * | Semantic Segmentation |
| * | Video Segmentation |
| * | Video Understanding |
| Selected Project Pages | |
| * | Action Bank |
| * | LIBSVX: Supervoxel Library and Evaluation |
| * | Brain Tumor Segmentation |
| * | CAREER: Generalized Image Understanding |
| * | Summer of Code 2010: The Visual Noun |
| * | ACE: Active Clustering |
| * | ISTARE: Intelligent Spatiotemporal Activity Reasoning Engine |
| * | GBS: Guidance by Semantics |
| * | Semantic Video Summarization |
| Data Sets | |
| * | YouCook |
| * | Chen Xiph.org |
| * | UB/College Park Building Facades |
| Other Information | |
| * | Code/Data Downloads |
| * | List of Grants |
Direct Methods for Surface Tracking in Stereo
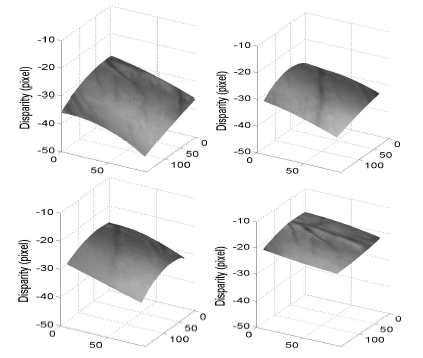
We have developed a set of algorithms to directly track planar surfaces
and parametric surfaces under a calibrated stereo-rig.
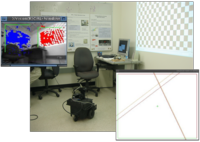
A movie demonstrating the planar surface tracking is here. A binary pixel mask is maintained which
determines those pixel belonging to the plane (and with good
texture); it is shown in red in the lower left of the video. The green
vector being rendered is the plane's normal vector. Left is an image
of the system that was built with our plane tracking routines to
localize mobile robots. In the image, we show the real scene, the two
walls that are being tracked (one in blue and one in red), and an
overhead (orthogonal) projection of the reconstructed walls.
Publications
| [1] | W. W. Lau, N. A. Ramey, J. J. Corso, N. Thakor, and G. D. Hager. Stereo-Based Endoscopic Tracking of Cardiac Surface Deformation. In Proceedings of Seventh International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI), 2004. [ bib ] |
| [2] | N. Ramey, J. J. Corso, W. W. Lau, D. Burschka, and G. D. Hager. Real Time 3D Surface Tracking and Its Applications. In Proceedings of Workshop on Real-time 3D Sensors and Their Use (at CVPR 2004), 2004. [ bib | .pdf ] |
| [3] | J. J. Corso, N. Ramey, and G. D. Hager. Stereo-Based Direct Surface Tracking with Deformable Parametric Models. Technical report, The Johns Hopkins University, 2003. CIRL Lab Technical Report 2003-02. [ bib | .pdf ] |
| [4] | J. J. Corso, D. Burschka, and G. D. Hager. Direct Plane Tracking in Stereo Image for Mobile Navigation. In Proceedings of International Conference on Robotics and Automation, 2003. [ bib | .pdf ] |