 |
 |
 |
| (view 1, 3.8 Mb) | (view 2, 4.7 Mb) | (view 3, 3.9 Mb) |
| Workshop on Future Directions in Nonlinear Control of Mechanical Systems Supplemental Material |
| MPEG Movies of example composition in paper | ||||||
|
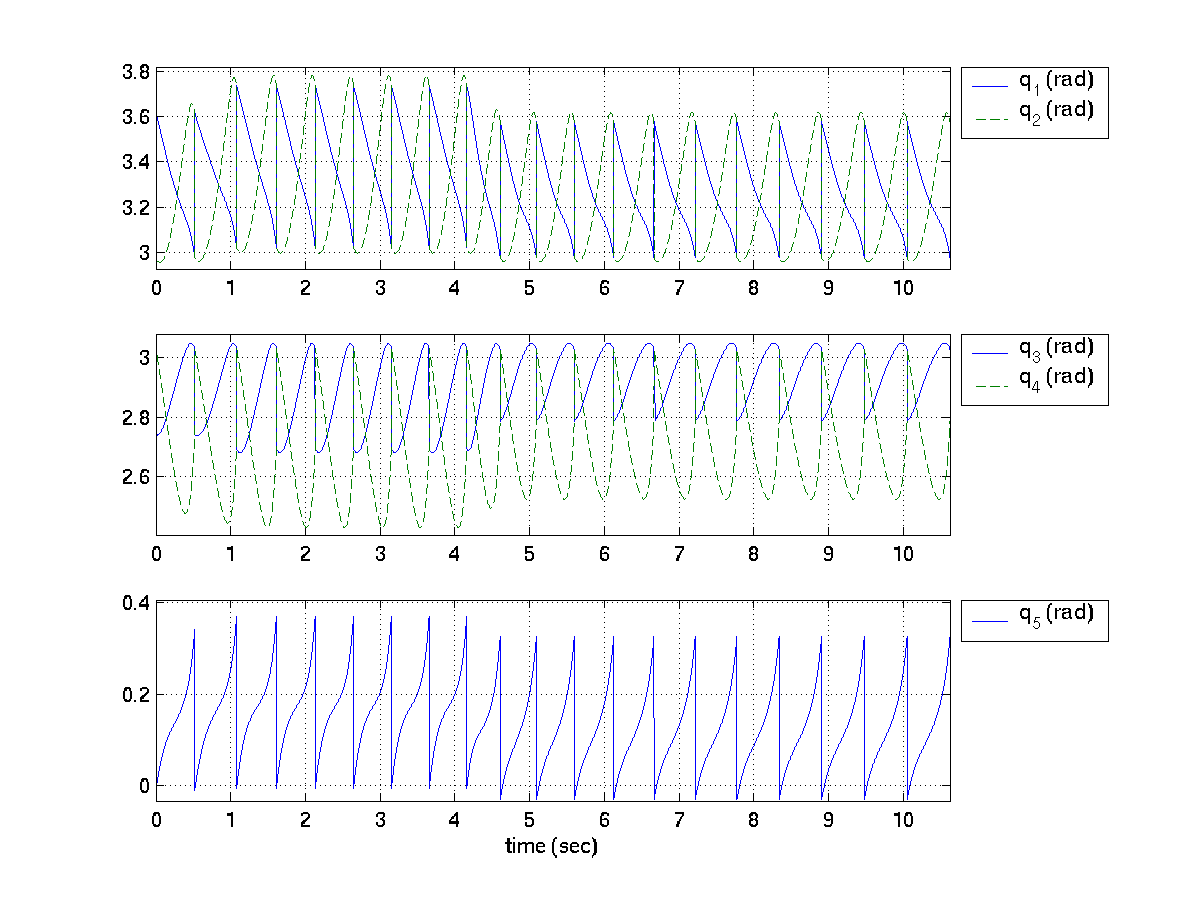
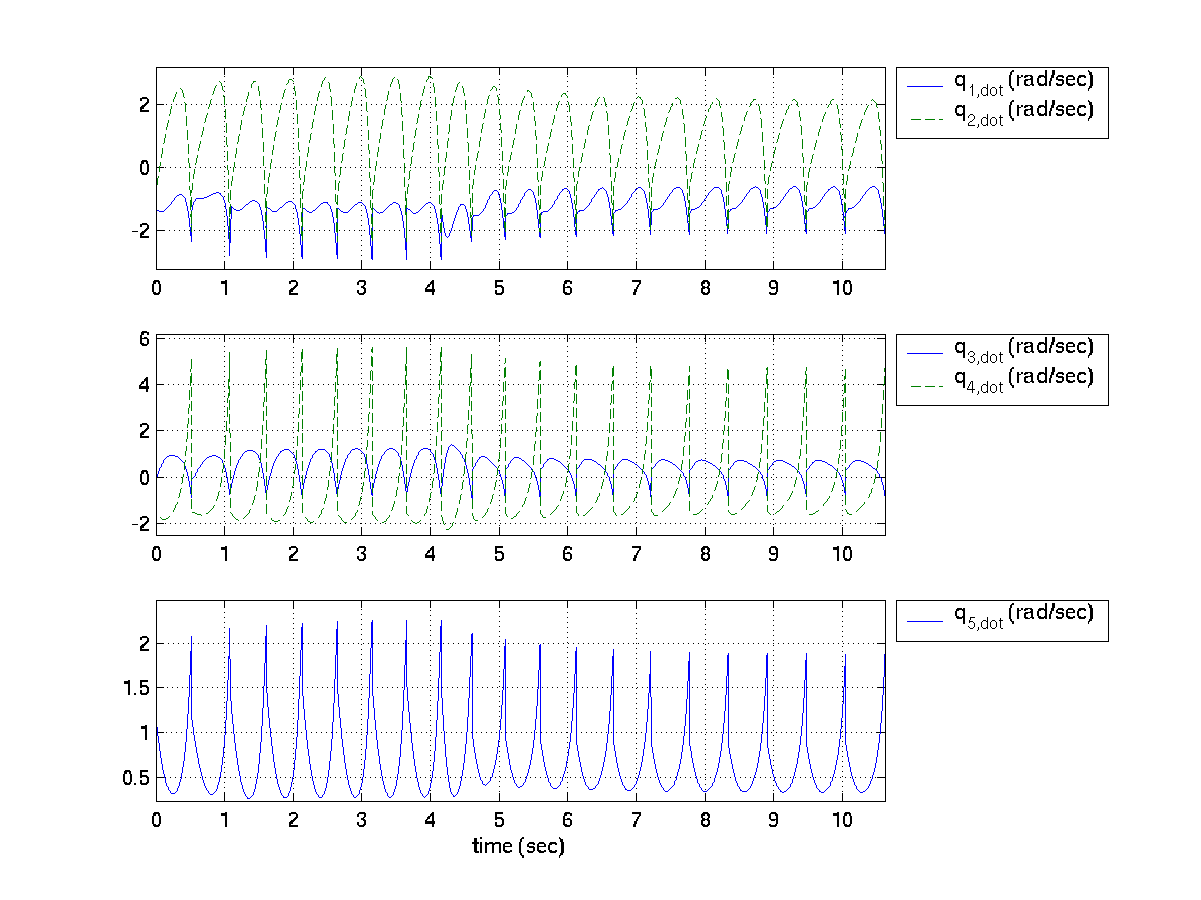
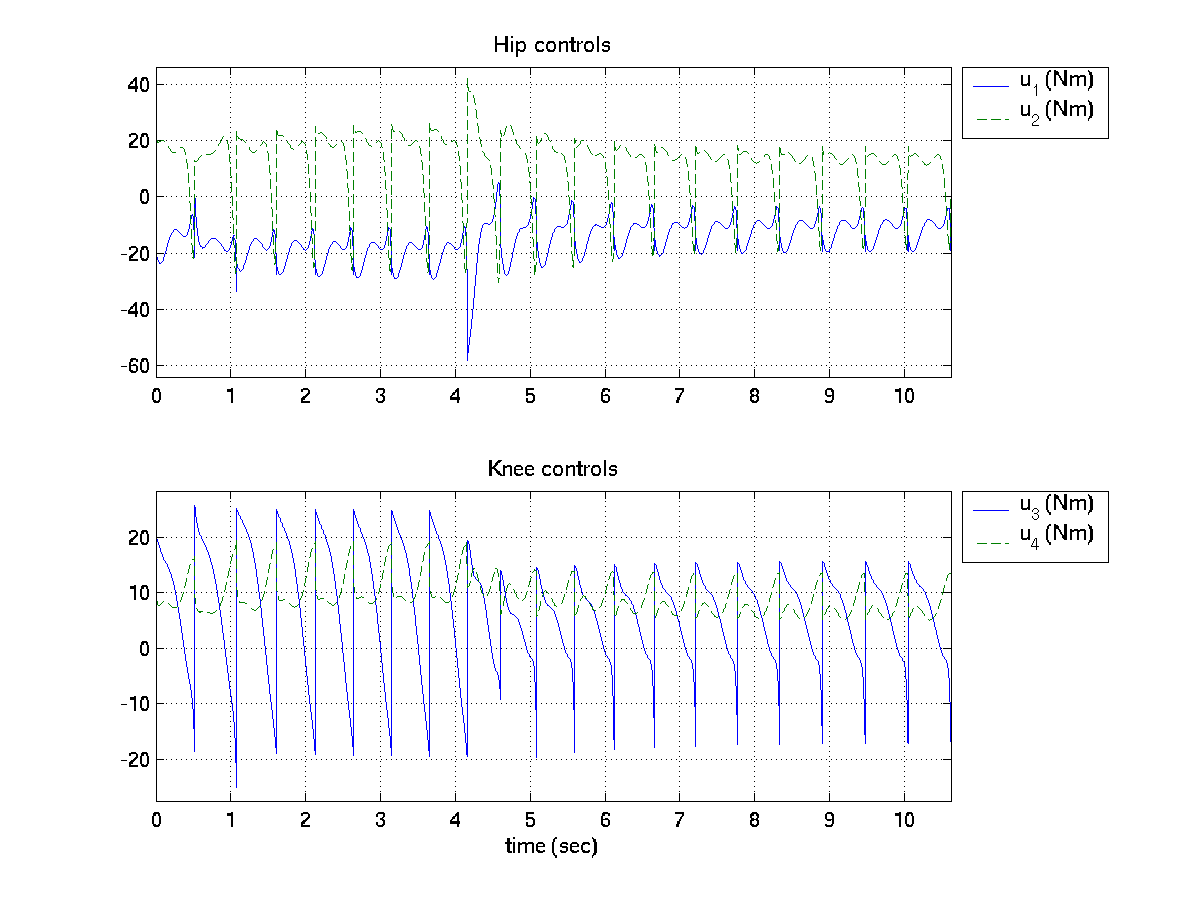
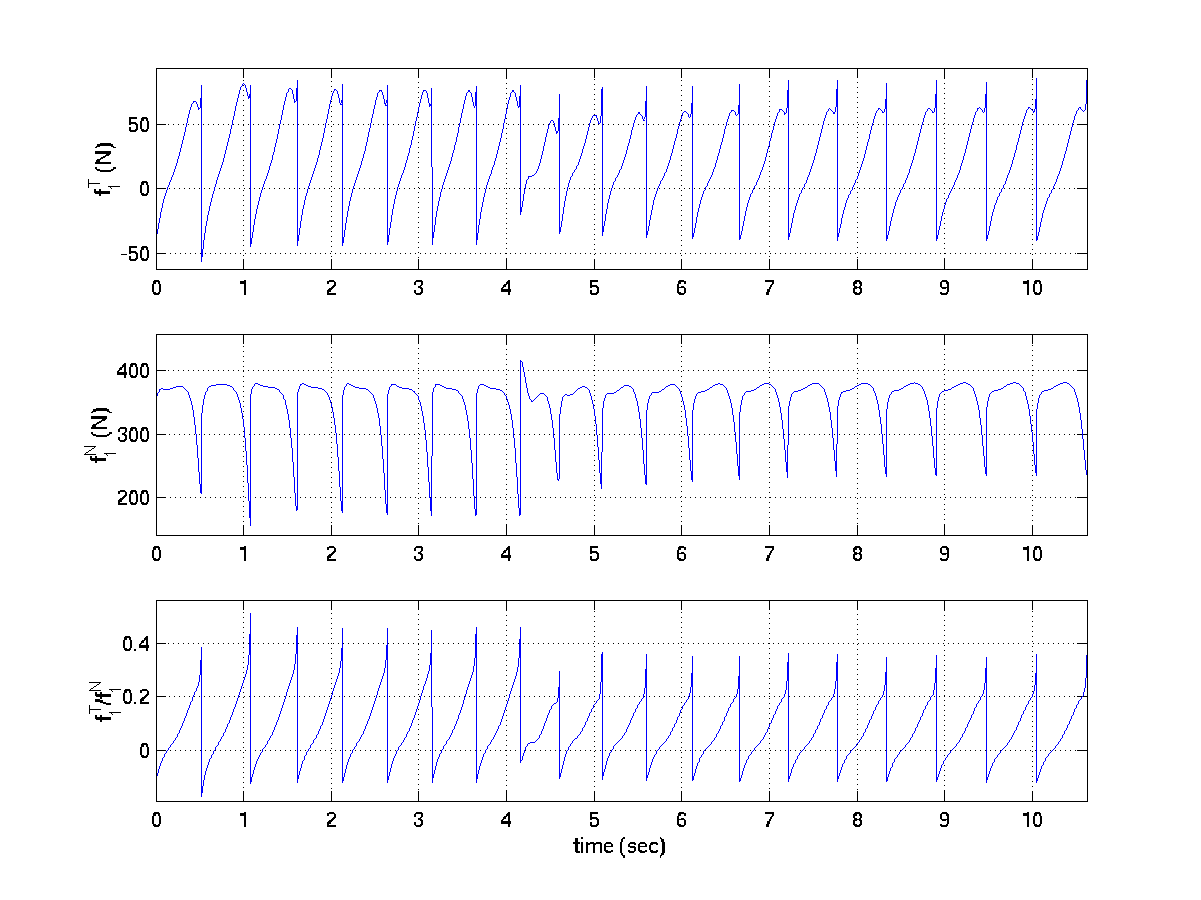
| Plots of various quantities of interest | ||||||||||||||||||||||||||||||
|
| The robot model equation details below are from the IEEE TAC Submission Supplemental Material |