Monopedal Running Control: SLIP Embedding and Virtual Constraint Controller by Ioannis Poulakakis and J.W. Grizzle.
| Simulation results and implementation details |
|
This document presents additional results accompanying the paper "Monopedal Running Control: SLIP Embedding and Virtual Constraint Controllers". The document is divided in two parts. In the first part, details regarding the simulation implementation of the controllers in [1] are given. In the second part, additional results that support the conclusions derived in [1] are included. The reader who is not interested in the implementation part can pass directly to Section II. |
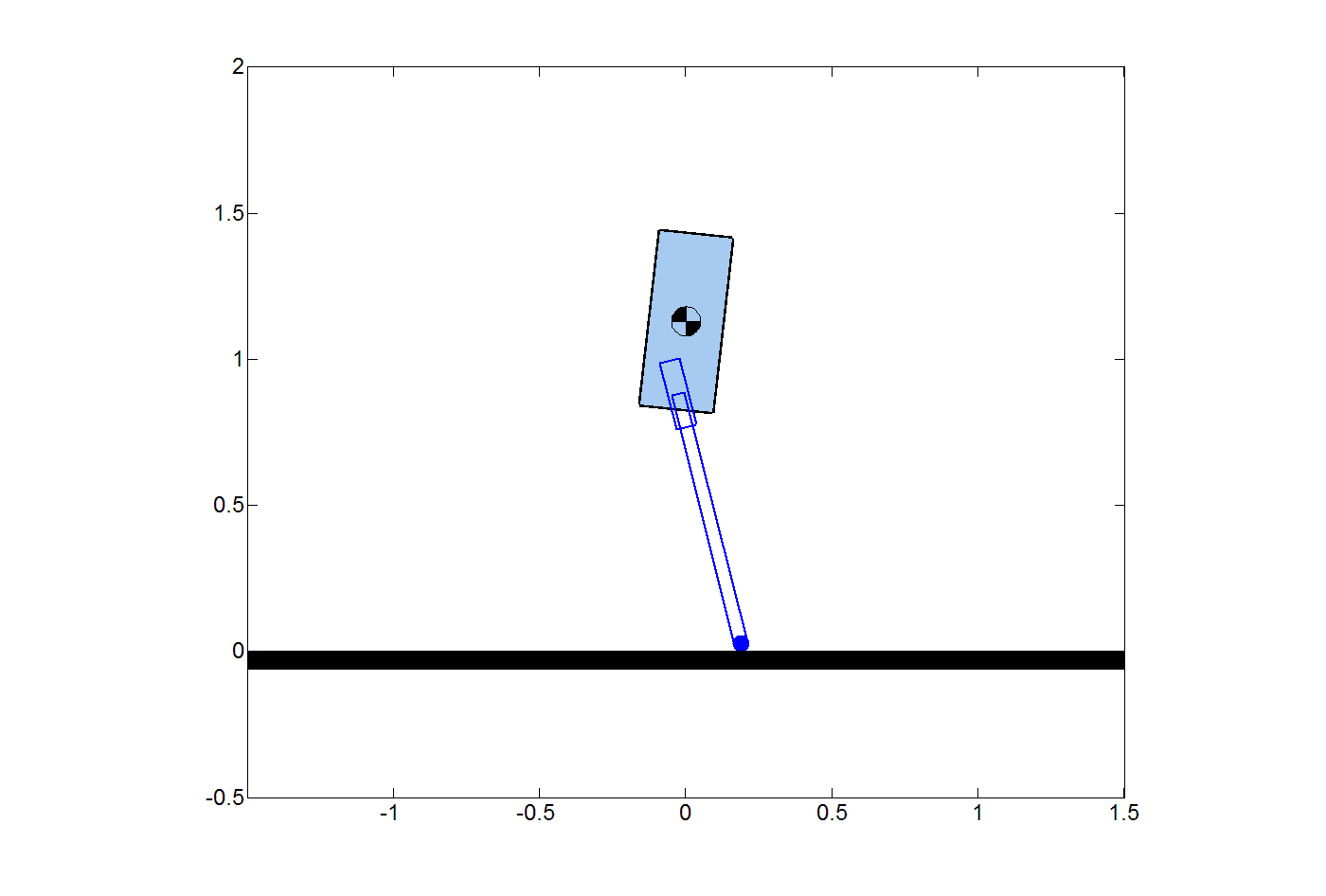
| Animation of Running Motion |
|
| Related papers |