Unfolding an Indoor Origami World












People
Abstract
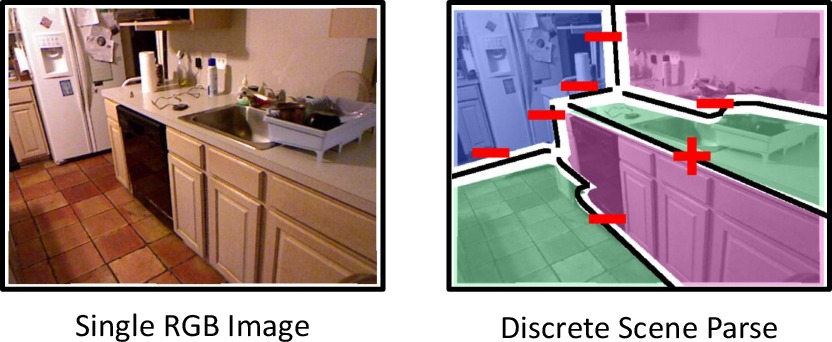
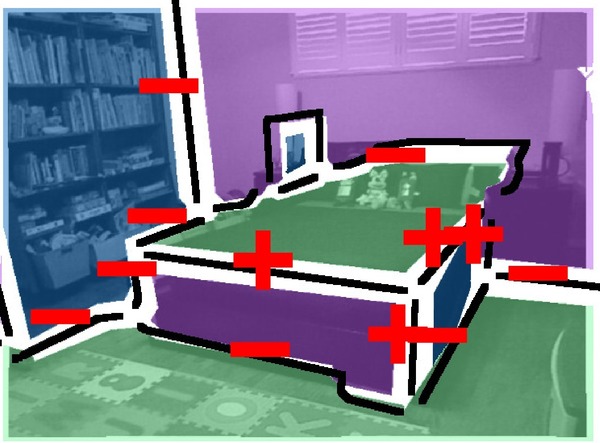
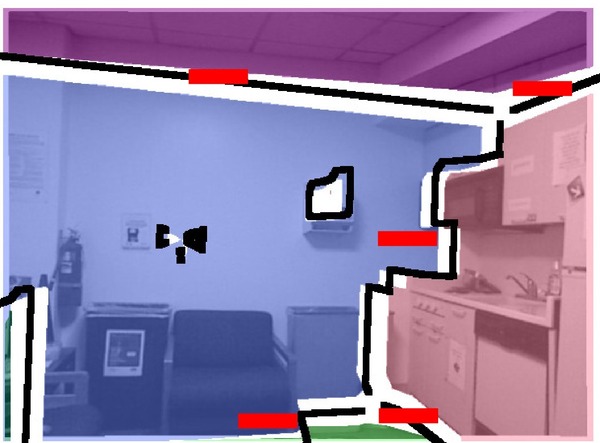
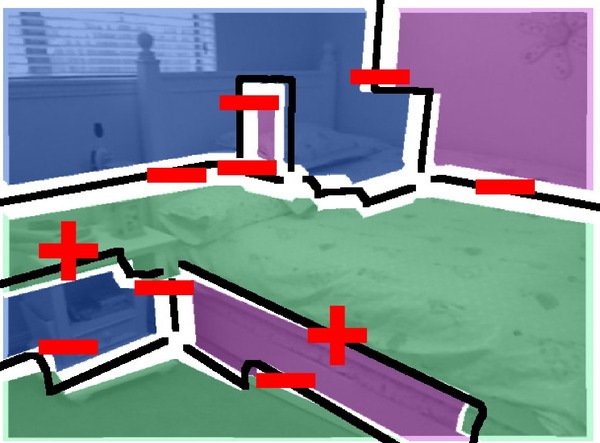
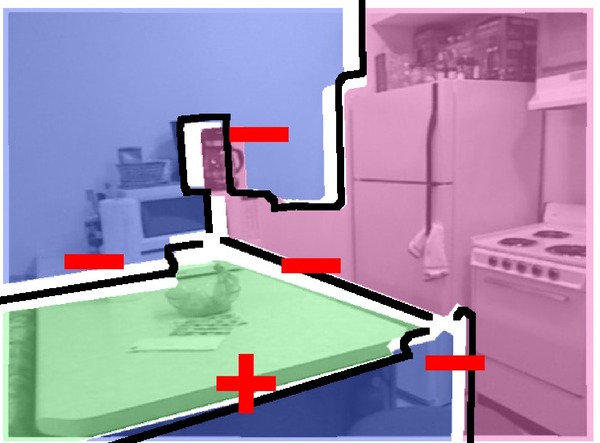
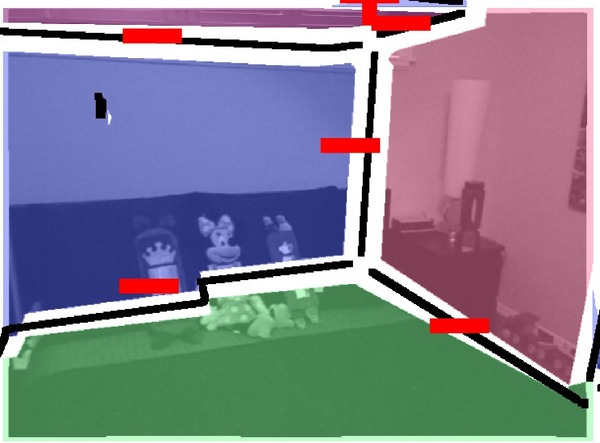
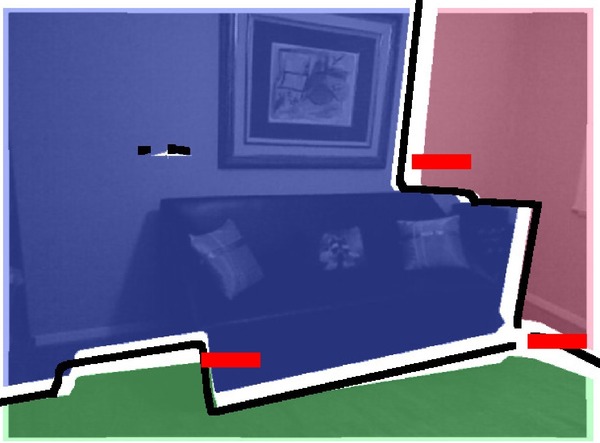
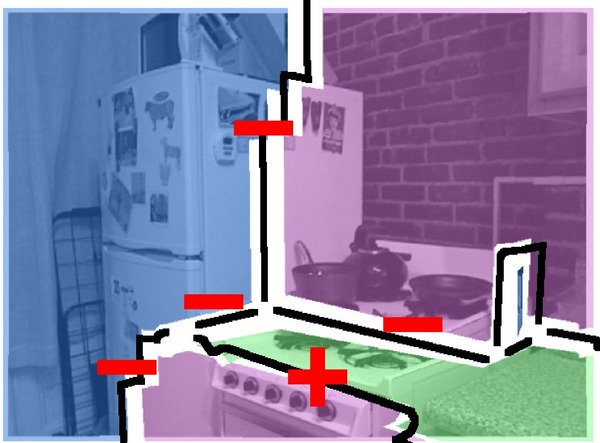
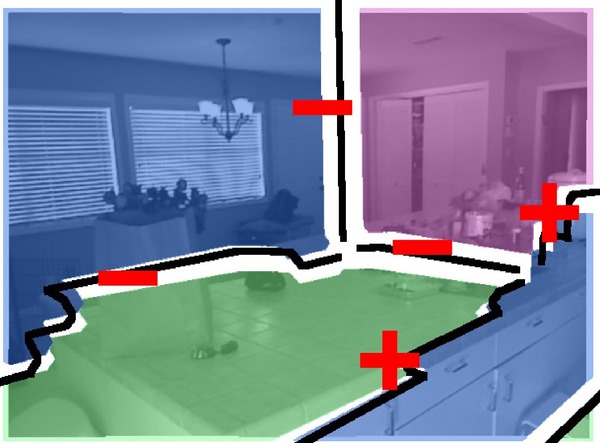
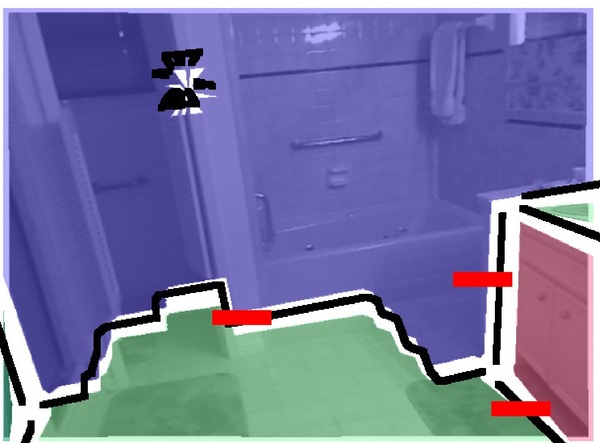
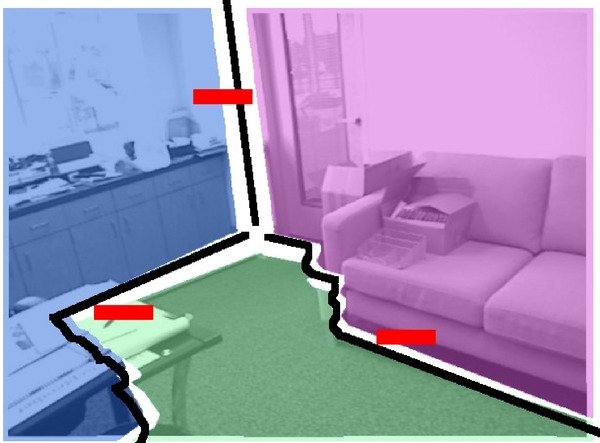
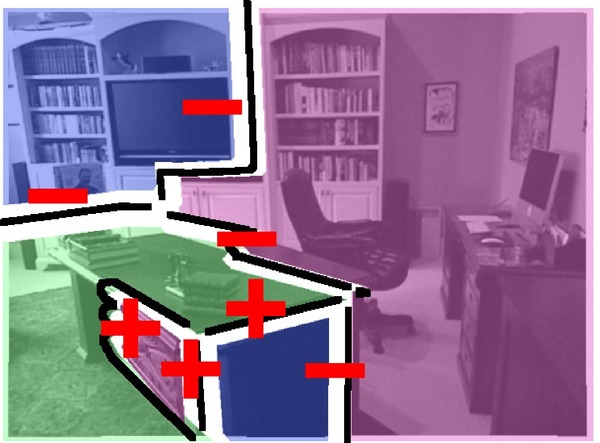
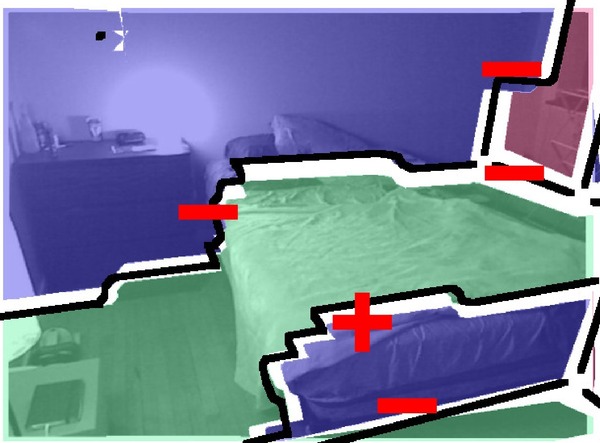
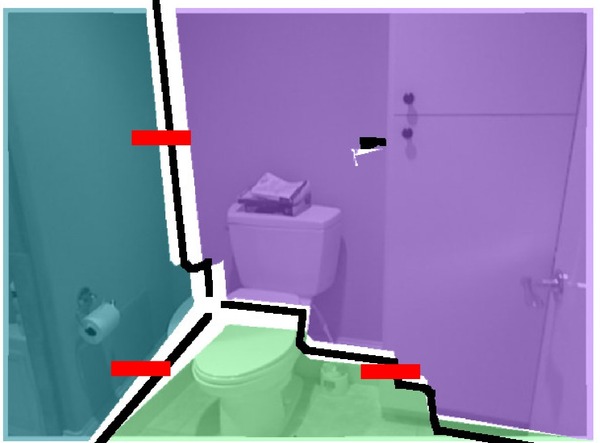
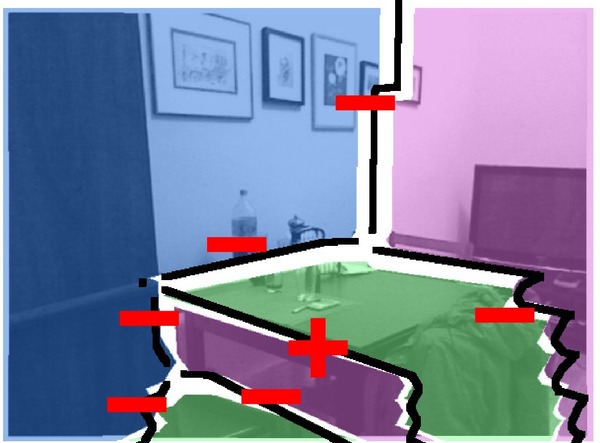
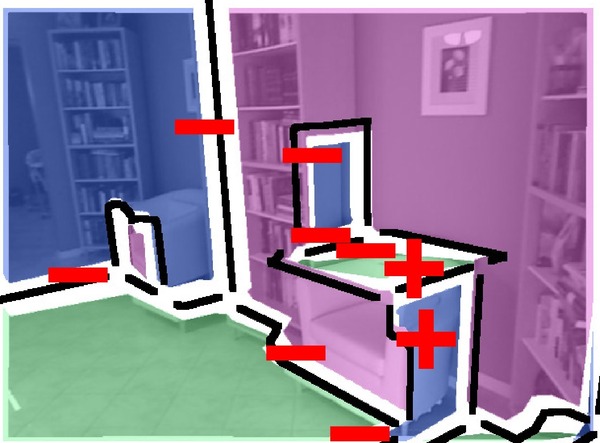
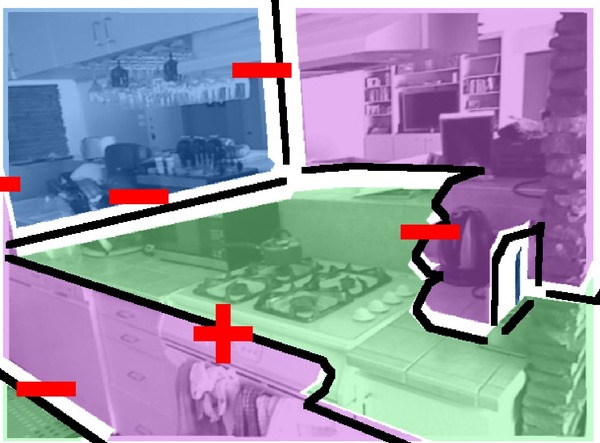
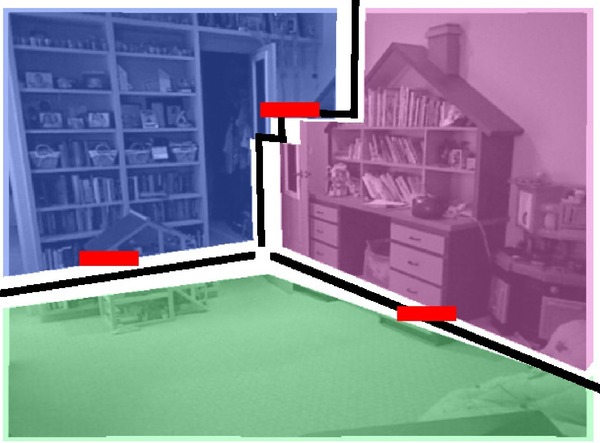
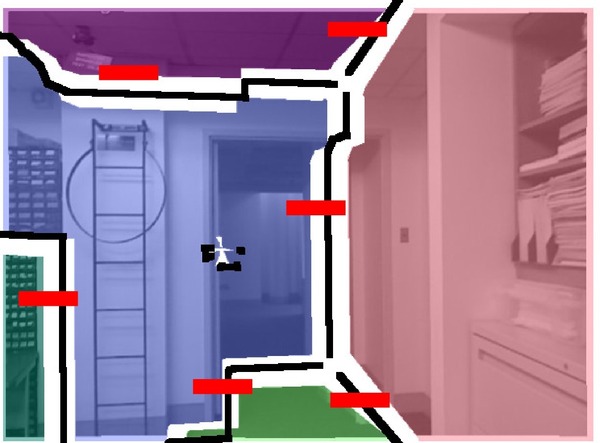
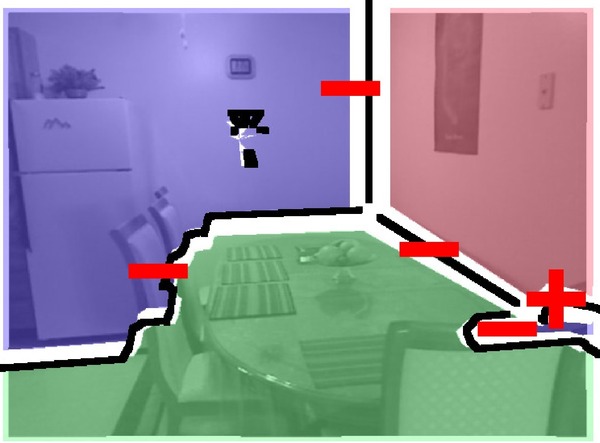
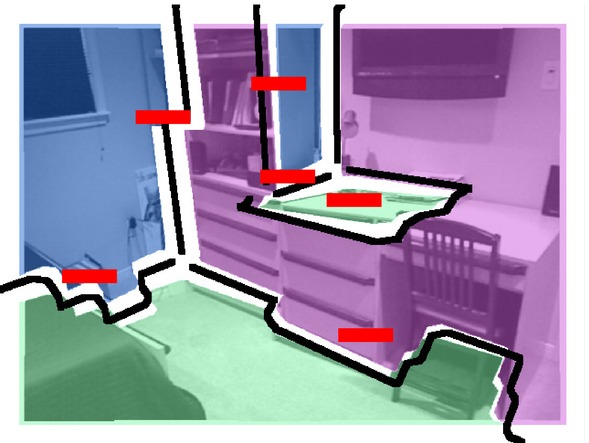
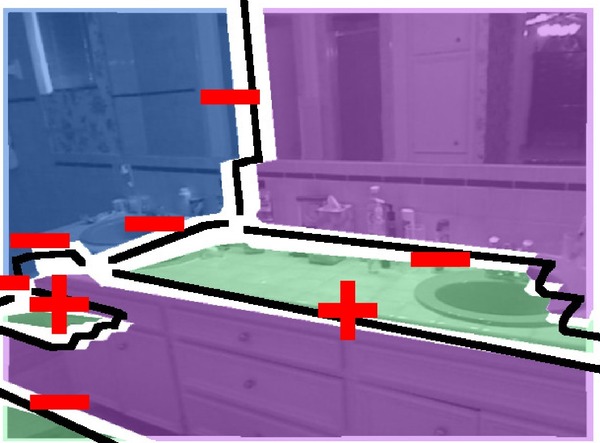
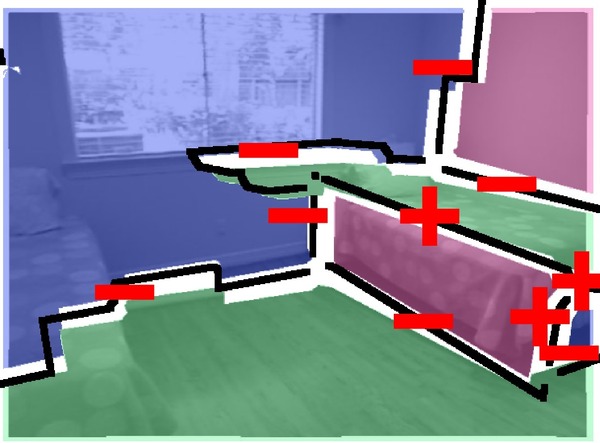
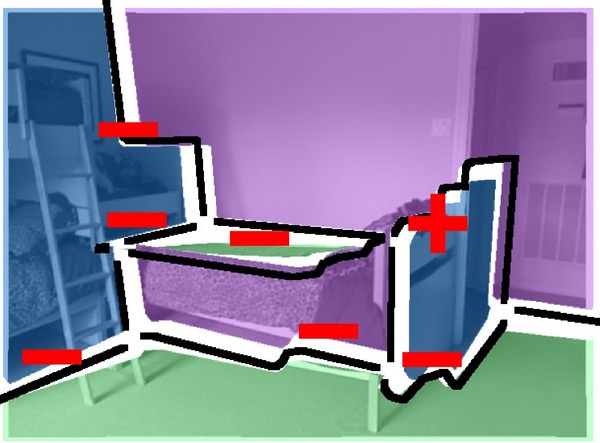
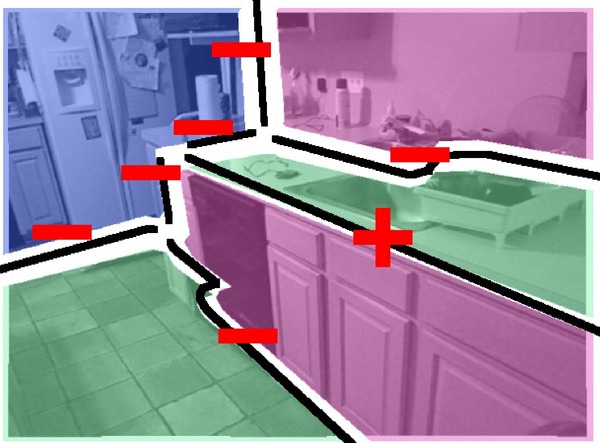
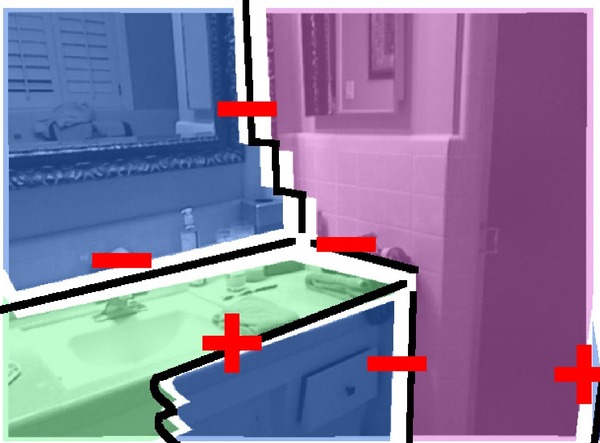
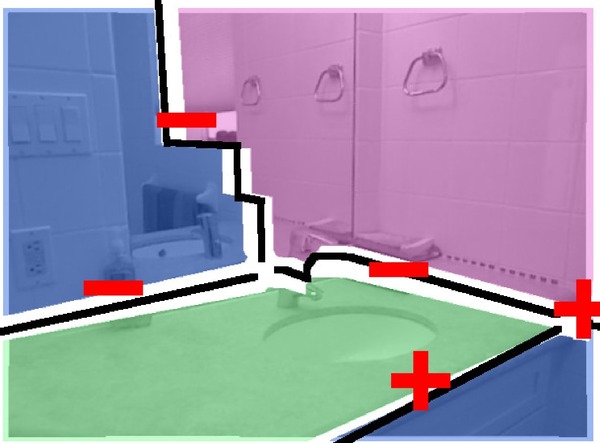
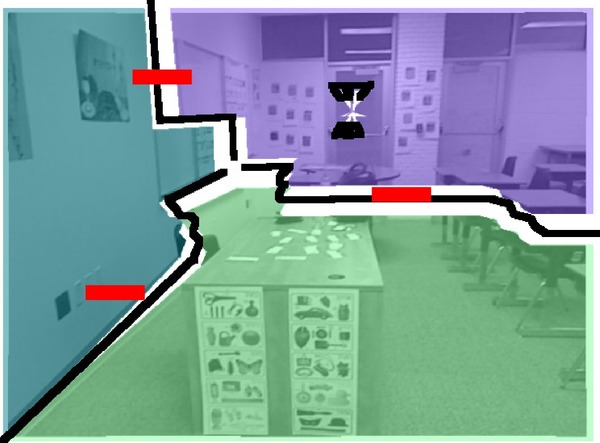
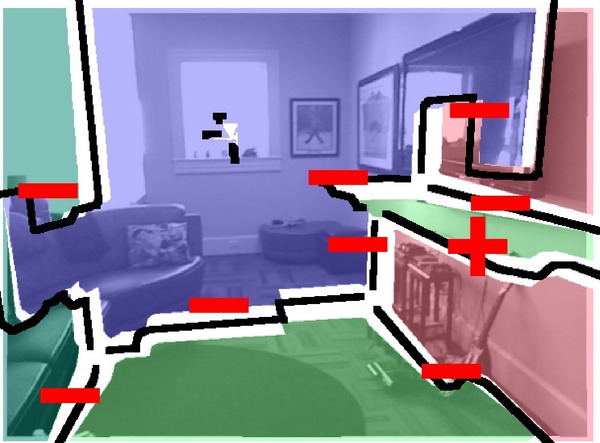
In this work, we present a method for single-view reasoning about 3D surfaces and their relationships. We propose the use of mid-level constraints for 3D scene understanding in the form of convex and concave edges and introduce a generic framework capable of incorporating these and other constraints. Our method takes a variety of cues and uses them to infer a consistent interpretation of the scene. We demonstrate improvements over the state-of-the art and produce interpretations of the scene that link large planar surfaces
Paper
|
ECCV Paper (pdf) Slides (pptx) Slides (pdf) Citation |
Extended Results
- Extended Scene Parse Gallery (PDF)
- Extended Scene Parse Gallery (Webpage)
- Extended Analysis on Significance, Stability (PDF)
Funding
This research is supported by:
- NDSEG Graduate Research Fellowship for David Fouhey
- NSF IIS-1320083
- ONR-MURI N000141010934
- A gift from Bosch Research & Technology Center
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author's copyright.