
Vulcan is a wheelchair robot with an onboard computer and several
sensors. It has a stereo camera mounted on a pan-tilt unit, two laser
range-finders - one mounted horizontally (blue) and the other
vertically (yellow), and two optical encoders over the rear
wheels. Vulcan has been used for research on mapping, human-robot interaction,
control, and safe navigation.
Lassie is an RWI Magellan Pro. It has a SICK LMS (blue) laser
range-finders mounted on top and rings of sonar, IR, and bump sensors
all around it. Lassie has been used for research on
mapping, and
bootstrap learning.

Clifford is an iRobot ATRV Jr. It has two SICK PLS laser range-finders
mounted on top and is used for outdoor research. An omnidirectional
camera can also be mounted on Clifford (not shown in picture) to give
it a 360 degree view of its surroundings.

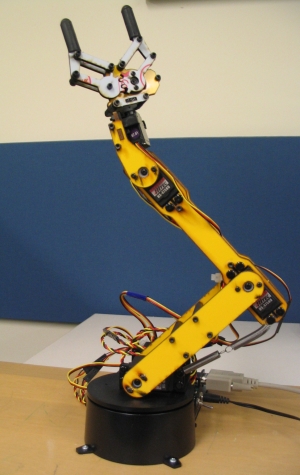
The latest addition to our lab is a small robot arm by Lynxmotion. It
is intended to be used for bootstrap
learning research.
A gallery of the older robots in our lab used for research and
demonstration purposes. The Rhino Arm on the right is still
occasionally used.
